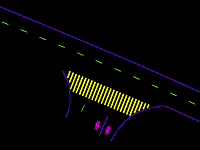
Outdoor road marking dataset
The is a road marking dataset for outdoor scenes. 12 segments of road point clouds are provided in this dataset, each segment is about 300 meters long. Each segment of the point cloud provides semantic and instance labeling of road marking. The acquisition equipment is RIEGL VMX-450, and the acquisition location is Xiamen, Fujian Province.
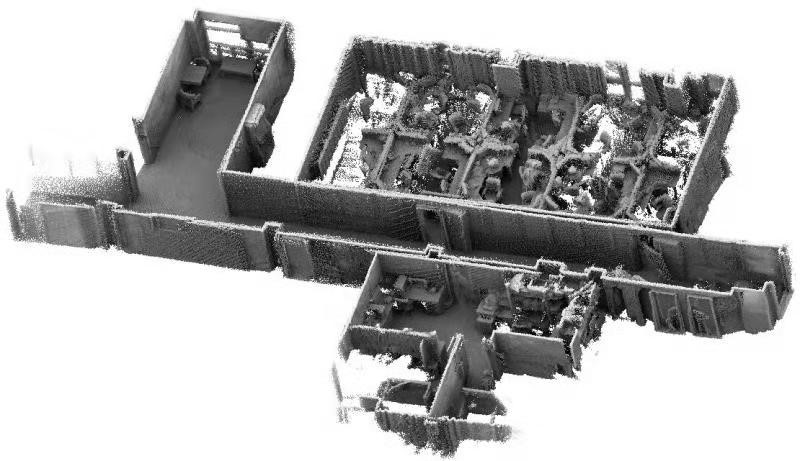
Indoor Laser Scanning Dataset
Indoor laser scanning dataset provides fours indoor point clouds data based on SLAM-mapping process. The scenes include large scale indoor parking lots, corridor and multiple rooms. This dataset also includes line framework extraction results of the scenes and provides a brief description of the indoor scene.
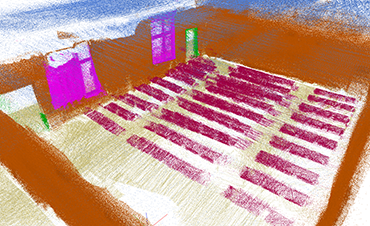
Colored Indoor Laser Scanning Dataset
Colored indoor laser scanning dataset provides point clouds data with RGB information based on multisensor calibration and LiDAR SLAM mapping methods.
Indoor LiDAR-based SLAM dataset
The indoor LiDAR-based SLAM dataset consists of three scenes captured by multi-beam laser scanners in indoor environments with various complexity. The original scan frame data from scanners are provided. Users can test their LiDAR SLAM algorithm on these data.
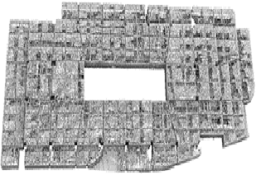
BIM Feature Extraction Dataset
The BIM feature extraction dataset contains data from three indoor scenes with various complexity. For each of the scenes, raw data (point cloud in LAS format) and corresponding BIM line framework (in OBJ format) are provided. Users can evaluate their methods using the downloaded reference line frameworks. Evaluation by submitting will open for further performance comparison. The evaluation results will be listed on the webpage.
Indoor Positioning Dataset
The indoor positioning dataset consists of five data sequences acquired in indoor environments with various complexity. Data sequences of sensor records from smartphones are provided. Users can test their positioning algorithm on these data.